 手機店鋪
手機店鋪
 微信公眾號
微信公眾號

服務熱線
0371-56619755 0371-56619756
182 3756 3366

?
該系統具有易擴展、抗干擾等特性。
通常情況下,機器人的控制需要計算機“大腦”的系統調配,因而當涉及群體協作,機器人與機器人之間的配合就需要計算機系統統一的調控,但是因為需要集中控制,在復雜協作任務的執行上,現有的機器人集群系統顯得吃力。
為了改進系統的擴展性能和靈活性,美國哈佛大學研究員李曙光和哥倫比亞大學研究員Richa Batra及同事共同設計了一款極簡系統,它可以模擬生物細胞集體遷移,實現了復雜任務的精準模擬。3月20日,這一工程學最新成果在《自然》雜志上得到發表。
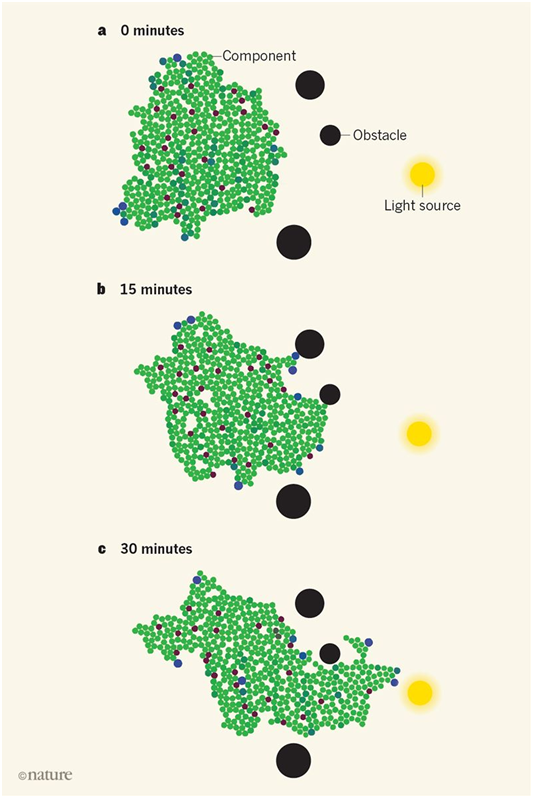
據悉,在單個機器人的設計上,研究人員選擇簡單的“盤狀”造型,它們由“粒子”構成,且不能做平面移動,只可像相機光圈一般做伸縮運動。但當它們聚集一起后,研究人員只要給它們光線刺激,整個系統就會對這一信號做出響應,并按照偏移模式振蕩,集體朝著刺激源移動。

實驗中,研究團隊用25個機器人現場演示了這一集群在移動、搬運物體等各方面的能力,同時模擬測試了10萬個機器人的表現,以展示它們的可擴展性。
值得一提的是,不同于傳統機器人系統,通過模擬測試研究人員發現這一系統在20%個機器人失效的情況下,依然能夠繼續運動并完成任務。對此,德國馬克斯?普朗克智能系統研究所科學家評價道,這種全新機器人具有傳統機器人系統所沒有的可擴展控制和魯棒性——這是一種抗干擾能力參數,也是在異常和危險情況下系統生存的關鍵。
億宏磨具中文官網 版權所有 備案號:豫ICP備18019016號-2 技術支持:河南億宏世紀網絡有限公司 網站地圖
